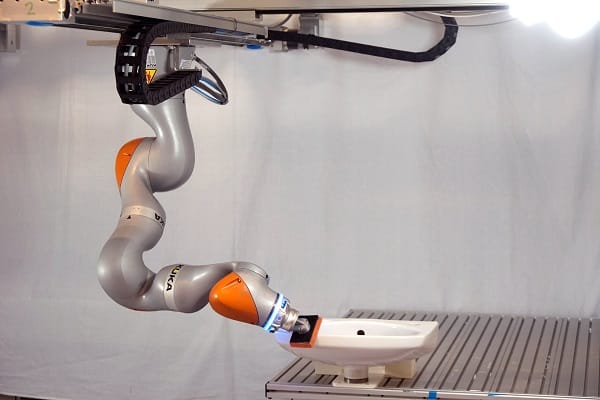
Forscher an der Technischen Universität in Wien haben einen Roboterarm entwickelt, der mithilfe von Prozessen aus dem Bereich des Maschinenlernens Arbeitsschritte, die ihm zuvor vom Menschen gezeigt wurden, nachahmen und flexibel auf andere Situationen anwenden kann. In dem Projekt wurde dem Roboterarm das Putzen eines Waschbeckens beigebracht.
Putzen ist längst nicht mehr nur Frauensache. Das weiß auch der Pfiffikus und legt deshalb auch im Bad selbst den Schwamm an. Freude bereitet ihm der Badputz aber nicht. Deshalb wurde er besonders hellhörig, als ihm zu Ohren kam, dass Forscher an der Technischen Universität in Wien einen Roboter entwickelt haben, der ihm diese unliebsame Arbeit möglicherweise in Zukunft abnehmen könnte.
Im Gegensatz zu anderen Robotern, denen ihre Arbeitsschritte durch feste Regeln und mathematische Formeln vorgegeben werden müssen, kann dieser Roboterarm Prozesse nachmachen, die ihm zuvor von Menschenhand gezeigt wurden, und diese sogar flexibel auf andere Situationen anwenden. „Die geometrische Form eines Waschbeckens mit Kameras zu erfassen, ist relativ einfach“, sagt Prof. Andreas Kugi vom Institut für Automatisierungs- und Regelungstechnik der TU Wien. „Viel schwieriger ist es, dem Roboter beizubringen: Welche Stelle der Oberfläche soll er mit welcher Art von Bewegung bearbeiten? Wie schnell? In welchem Winkel? Mit welchem Kraftaufwand?“
Als Mensch lernt man so etwas durch Erfahrung und Imitation. „In einer Werkstatt blickt dann vielleicht jemand dem Lehrling über die Schulter und sagt: Dort bei der engen Kante musst du ein bisschen fester andrücken“, sagt Christian Hartl-Nesic, der im Team von Andreas Kugi die Industrial-RoboticsGruppe leitet. „Wir wollten einen Weg finden, den Roboter auf ganz ähnliche Art lernen zu lassen.“
Putzschwamm mit Vorführeffekt
Dafür wurde ein Putzschwamm mit Kraftsensoren und Tracking-Markern versehen, dann wurde damit von Menschen wiederholt ein Waschbecken geputzt – allerdings nur die Vorderkante. „Aus einigen wenigen Demonstrationen generieren wir eine Riesenmenge an Daten, die dann verarbeitet werden, damit der Roboter lernt, was richtiges Putzen eigentlich bedeutet“, erklärt Christian Hartl-Nesic.
Dieser Lernprozess gelingt durch eine innovative Datenverarbeitungsstrategie, die vom Team der TU Wien entwickelt wurde. Dabei werden mehrere bereits bestehende Techniken aus dem Bereich Maschinenlernen kombiniert. „Der Roboter lernt, dass man den Schwamm je nach Oberflächenform anders halten muss, dass man an einer eng gekrümmten Stelle eine andere Kraft aufwenden muss als auf einem ebenen Flächenstück“, erklärt der Doktorand Christoph Unger aus der Industrial-Robotics-Gruppe.
Die vorgestellte Technologie ist für viele Prozesse interessant, sei es das Schleifen von Holzwerkstücken, das Reparieren und Polieren von Lackschäden oder das Schweißen von Blechteilen. Auch international sorgt die Technologie bereits für Aufsehen: Bei der IROS 2024 im Oktober 2024, einer Konferenz mit über 3.500 eingereichten wissenschaftlichen Arbeiten, wurde die Arbeit der TU Wien mit dem „Best Application Paper Award“ ausgezeichnet und somit unter die Top-Innovationen des Jahres gewählt.
Ihr
Pfiffikus